How a combat robot works
Combat robots, best known from the popular TV show BattleBots, are a fascinating example of engineering, creativity, and strategy. They are not autonomous machines, but remote-controlled “drones” whose sole purpose is to destroy or immobilize their opponents in the arena.
The functioning of these robots is a complex interplay of robust construction, powerful motors, effective weapons, and precise control.
Anatomy of a combat robot
Each combat robot is unique, but they all share basic components that enable them to move, attack, and withstand blows.
Control - transmitter and receiver
One of the most important parts of any robot is the so-called radio transmitter and receiver. The transmitter is the controller you hold in your hand – it sends commands to the robot. The receiver is a device inside the robot that picks up these signals and passes them on through small 3-pin connectors. We usually refer to them by the abbreviations Tx (transmitter) and Rx (receiver).
When choosing these devices, make sure they can communicate with each other – different models operate on different communication protocols!
We recommend the combination of the FS-i6 transmitter and the FS2A 4-channel receiver – they are easily available and work well together. A good radio controller is a long-term investment – models with so-called model memory (such as the FS-i6) can store settings for multiple robots, so you can control different robots with a single controller just by switching the profile.

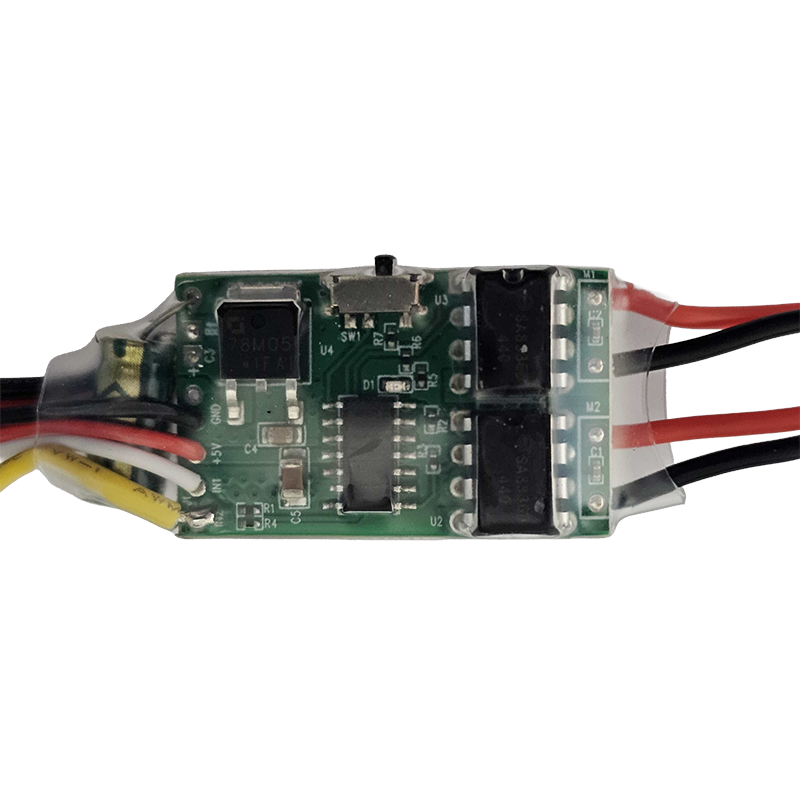
Electronic Speed Controllers (ESC)
If you are not using special motors like servos for propulsion, you will almost certainly need an ESC – an electronic speed controller. It converts commands from the receiver into the corresponding voltage for the motors – the further you move the stick on the controller, the higher the voltage and, consequently, the higher the motor speed.
ESCs are divided into:
-
Brushed – for classic DC motors (e.g., small geared motors)
-
Brushless – for more powerful motors (e.g., weapon motors), they require 3 wires
By default, an ESC controls only one motor, but some ESCs have two channels, allowing you to control two motors at the same time.
Drive
The drivetrain provides the robot with mobility, which is crucial in the arena for both attacking and escaping. Speed and pushing power are primarily influenced by the motors and wheels.
Brushed DC motors with a gearbox are most commonly used as drive motors; they have a wound coil inside a magnetic casing and spin when you supply them with electricity.
Brushless motors are more modern – the switching of power between the coils is handled by electronics, not mechanical brushes. They are more powerful, but require specialized ESCs and have 3 wires instead of two.
You can experiment with different types of wheels and chassis layouts to achieve optimal traction and maneuverability on the arena floor. In the case of four wheels or tracks, the entire weight of the robot is on the driven wheels, providing better traction at the cost of extra weight compared to a two-wheel system. For tires, you can use materials such as ordinary rubber bands, Lego tires, O-rings, sanitary silicone, or cast polyurethane.

Power supply – Batteries (LiPo) and BEC
Most combat robots use LiPo (Lithium Polymer) batteries – they are small, lightweight, and powerful, but they must be handled with care and charged only with a suitable charger.
Receivers and other electronics often handle only 5 V, while batteries provide more. That is why a BEC (Battery Eliminator Circuit) is used – a voltage converter that steps down higher voltage to, for example, exactly 5 V.
Many ESCs already have a BEC built-in, so it is not always necessary to buy one separately – but always check this in advance.

Robot chassis
For antweight robots (up to 150 g), 3D printing is becoming increasingly popular, mainly because it allows for the creation of complex shapes and integrated frames. The materials used (so-called filaments) are primarily:
-
Super PLA+ / PLA-ST – hard and easy to print
-
ABS – durable, more difficult to print, low inter-layer adhesion
-
TPU – a very durable material available in various hardnesses; soft and flexible variants do not hold their shape and are not ideal for creating a frame, but they are a good choice for armor
Other proven materials include polycarbonate, aluminum, titanium, and, provided the robot fits within the weight limit, steel.
Weapon
Weapons are the heart of every combat robot and a very personal choice – build one that you will enjoy. Below is an overview of the basic types:
- Wedges
A wedge-shaped front allows you to get under your opponent, enabling you to push them, flip them, or drive them into the wall. An acetate sheet is often added for an even lower profile, making it easier to slide under the opponent.
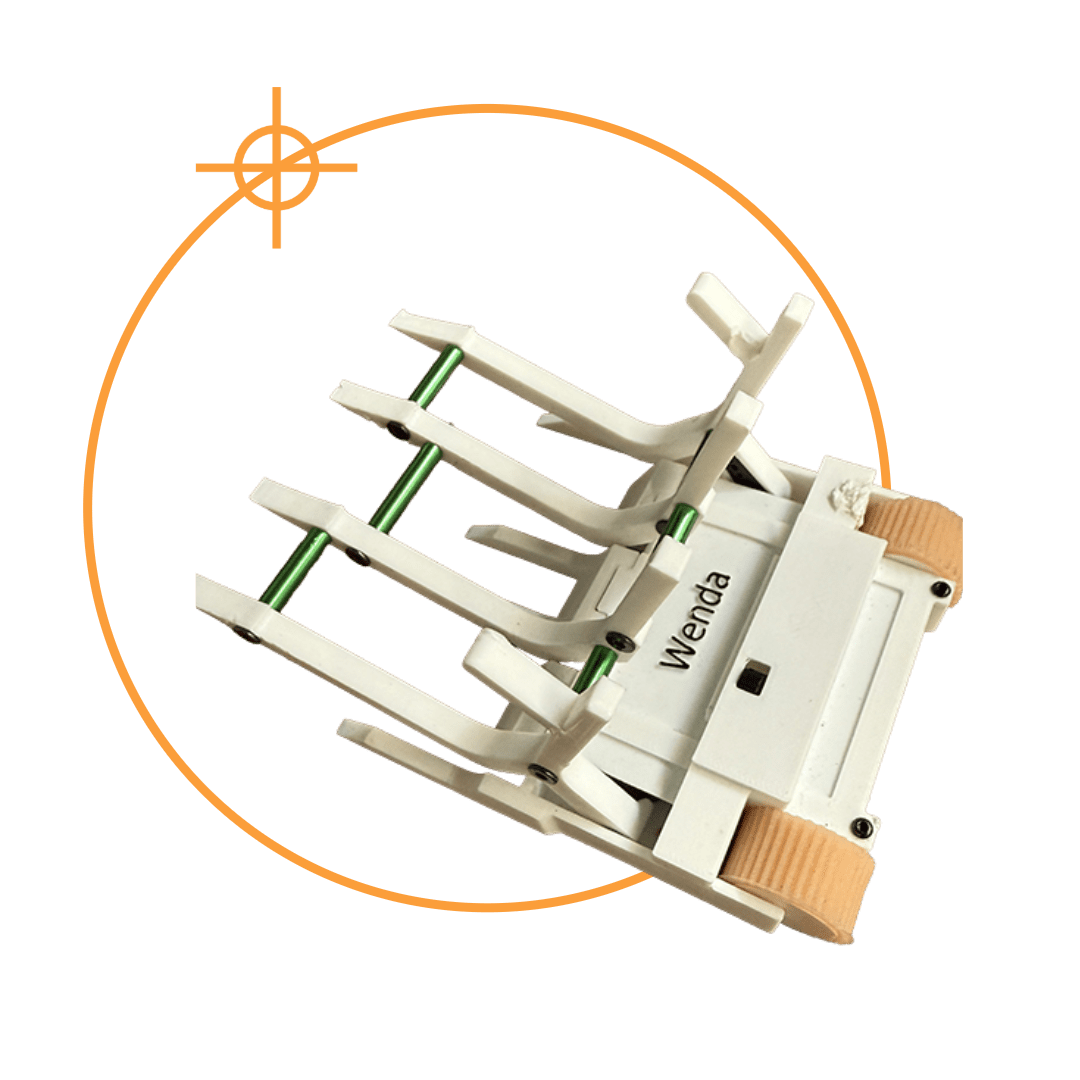
- Lifters and Grabbers
These work on the principle of an arm that either lifts the opponent from underneath or clamps down on them from above, like pliers. They are usually powered by servos, which can be plugged directly into the receiver.
- Axes, Hammers
As the name suggests, this is an arm that swings down in a fast motion. They can be built using a brushed gear motor and a separate ESC – similar to the drivetrain.
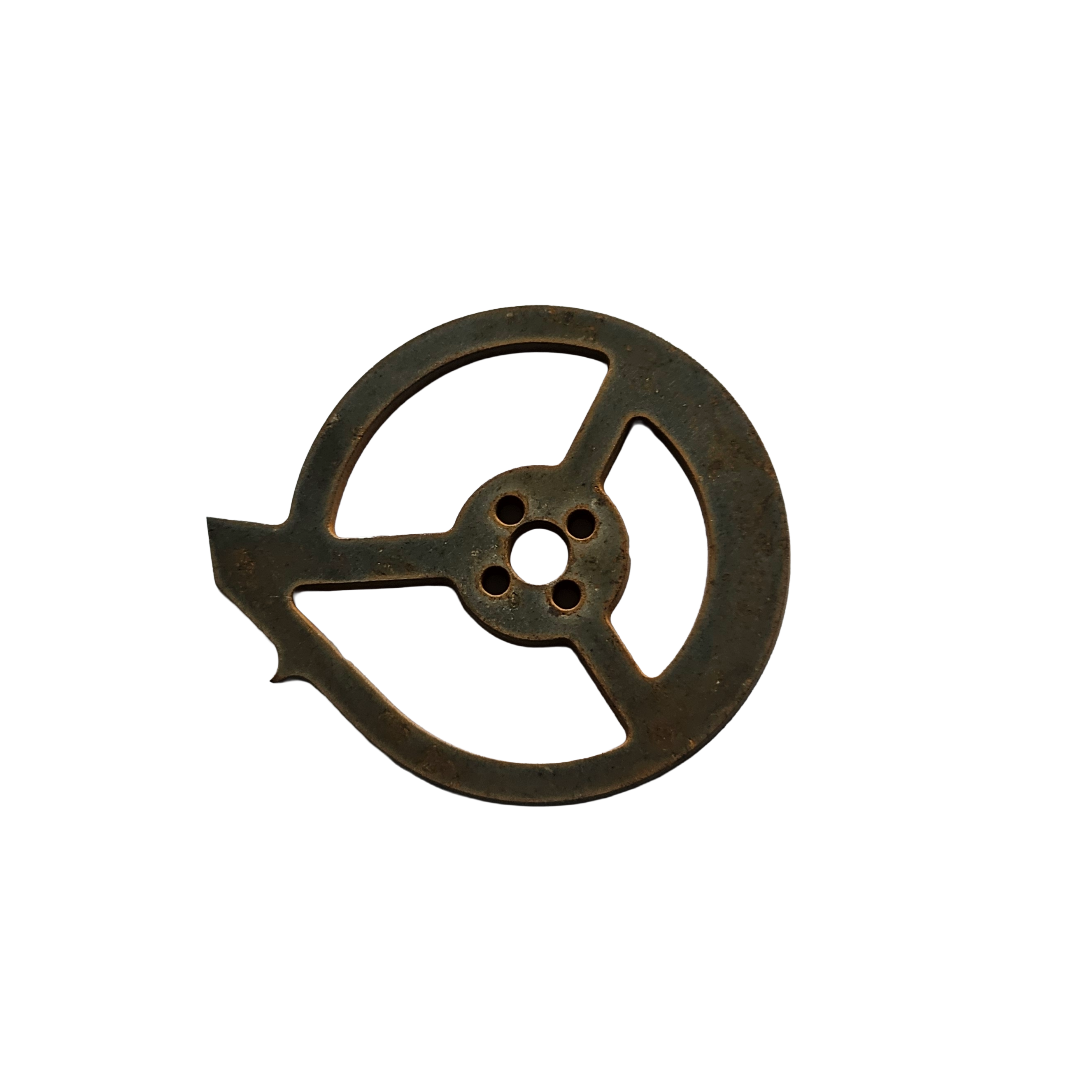
- Spinners (Rotating weapons)
The most complex type – they require a brushless motor + brushless ESC. We recommend not starting with a spinner as your first robot. If you do, never test it outside of a secure arena!
Most common types:
-
Vertical – they rotate vertically
-
Horizontal – they rotate horizontally