Jak postavit bojového robota
Doufejme, že vám tento návod pomůže proměnit hromadu součástek v plně funkční obvod nebo dokonce v bojového robota.
Základní komponenty a zapojení
Díly, které budete potřebovat na stavbu základního robota:
- 2S Lipo baterie 120-300 mAh, kapacita záleží dle typu zbraně, rotující potřebuje více energie
- Vypínač, nejčastěji se používá posuvný
- Dva kartáčové motory s převodovkou, nejčastěji N20, případně i N10 a N30, rpm 300-1000 při 6V, záleží na požadované rychlosti a průměru kol
- Kola – aby co nejméně prokluzovala, např. plastový rám s gumou okolo, pěnová kola
- Rám robota – nejsnazší je rám vytisknout na 3D tiskárně, případně se dá stavět z polykarbonátu, hliníku, lega, merkur, vše co jde
Další vybavení, které budete potřebovat:
- Nabíječku LiPo pro nabíjení baterie
- Vysílač a přijímač pro ovládání robota – Flysky vysílač a FS2A přijímač
- Páječka a pájka
- Nářadí na štípání/odstraňování izolace
- Smršťovací bužírka nebo izolační páska
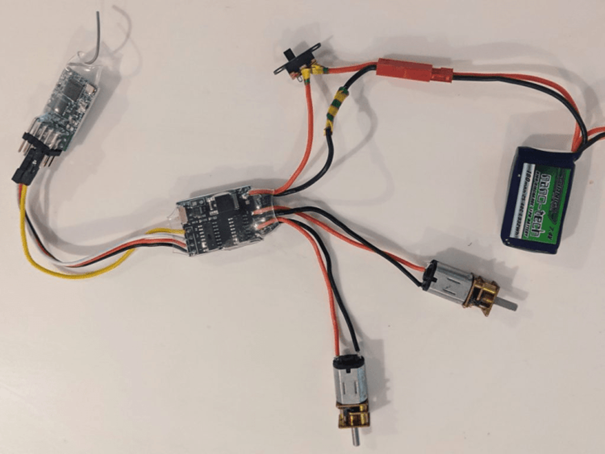
Cílem je součástky zapojit do následujícího obvodu:

V případě jakýchkoli problémů nebo dotazů během stavby nám můžete napsat e-mail na adresu info@flsbattlebots.com nebo nám napsat na forum, rádi vám pomůžeme.
Část 1: Pájení motorů
Duální regulator otáček pro kartáčové motory (ESC) je dodáván s předpájenými konektory, ty ale nebudeme využívat, abychom ušetřili místo a váhu, takže musíme připájet hnací motory N20 napřímo.
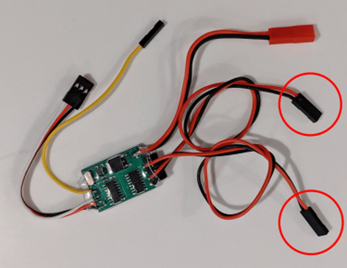
Nejprve odřízněte dva černé konektory v kroužku, to jsou výstupy pro motory. Pokud chcete ušetřit trochu hmotnosti a místa, můžete kabel zkrátit. Při pájení zkontrolujte zadní stranu motorů a hledejte malý symbol plus u jednoho z kontaktů motoru.

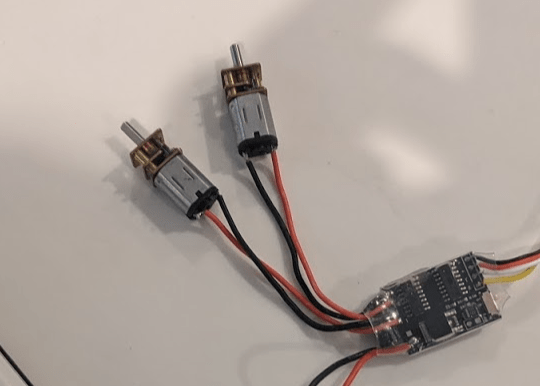
Vyplatí se připájet kontakt motoru na straně plus k červeným vodičům výstupu ESC na obou N20 – to znamená, že se budou otáčet stejným směrem, když chceme!
Odstraňte tedy kousek izolace z konce každého ze čtyř vodičů a připájejte každý pár červeného a černého vodiče ke kontaktům na motorech N20 – ujistěte se, že se jedná o správné dva vodiče na motor – jeden pár je na desce plošných spojů u ESC označen M1 a druhý M2.
Část 2: Pájení spínače
Toto je volitelné, ale je dobrým zvykem mít způsob, jak robota zapnout nebo vypnout, kromě odpojení baterie.
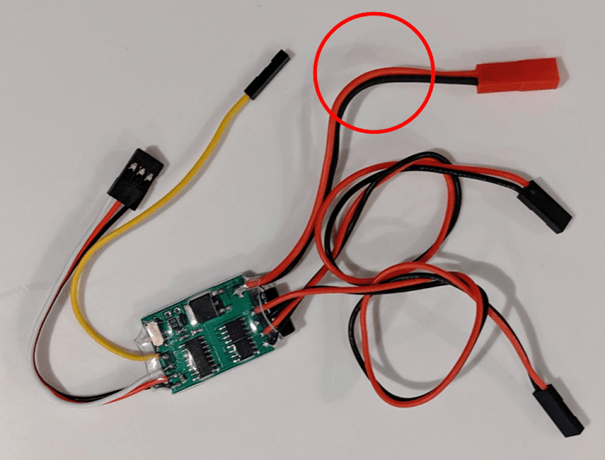
1. Nejprve odstřihněte červený vodič v kroužku, ale černý vodič nechte tak, jak je.
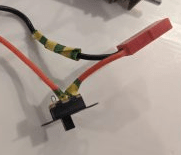
2. Odstraňte kousek izolace z každé strany červeného vodiče a jeden konec připájejte k vnějšímu pinu a druhý konec k prostřednímu pinu spínače. K zakrytí pinů a odkrytého vodiče použijte smršťovací bužírku nebo izolační pásku.
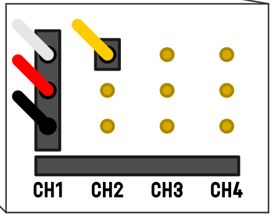
3. Zapojte nevyužité kabely ESC následujícím způsobem do rádiového přijímače FS2A. Tím je základní obvod hotov.
Brzy bude následovat návod na nastavení vysílače a přijímače a přidání zbraní na robota.