Jak ovládat bojového robota přes mobil
Přeměna chytrého telefonu na dálkový ovladač pro bojového robota je stále častějším řešením, které si nachází oblibu u kutilů i v některých soutěžích. Hlavní výhodou je flexibilita a využití zařízení, které má téměř každý u sebe. Celý proces propojení telefonu s robotem stojí na třech pilířích: hardwarovém vybavení robota, softwarové aplikaci v telefonu a způsobu jejich vzájemné komunikace.
Princip fungování
Základní princip spočívá v nahrazení klasického pákového RC ovladače mobilní aplikací. Aplikace na telefonu generuje řídicí povely, které bezdrátově odesílá do přijímacího modulu uvnitř robota. Tento modul předává signály regulátorům otáček – mozku robota – která je přeloží na konkrétní pokyny pro motory pohonu a zbraňové systémy.
Co je potřeba k propojení?
Celé řešení se skládá z několika částí, které musí spolupracovat.
1. Mikrokontroler (ESP32/Arduino)
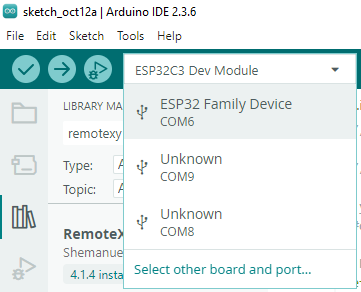
Srdcem robota je mikrokontroler, nejčastěji v podobě desky ESP32 nebo Arduino. Model ESP32-C3 je skvělou volbou díky svým malým rozměrům a možností připojení jak přes bluetooth, tak i Wi-Fi, ale dokonce i přes protokol ESP-NOW.

2. Aplikace v mobilním telefonu
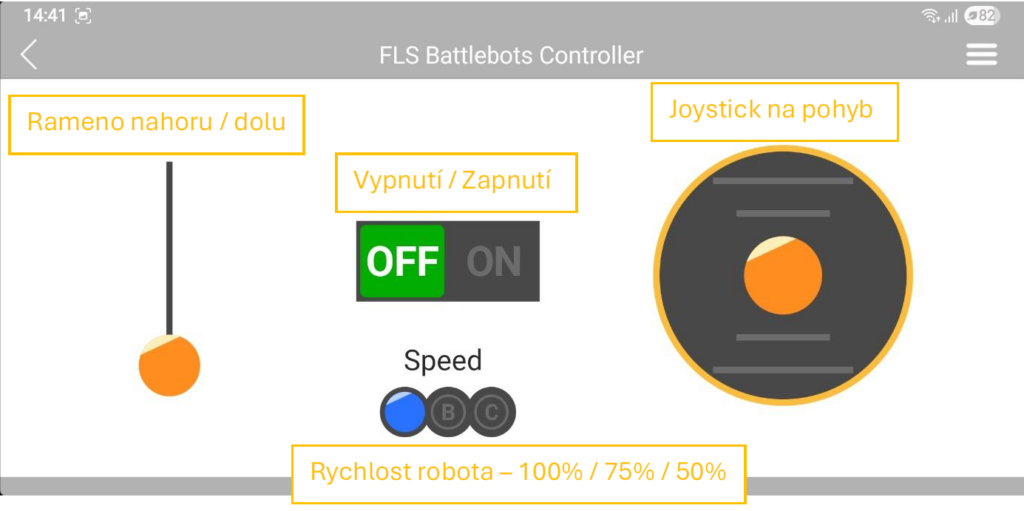
- Hotové univerzální aplikace: Pro Android i iOS existuje mnoho hotových aplikací, které slouží k ovládání robotických projektů. Aplikace jako Remote XY umožňuje snadno si vytvořit vlastní ovládací panel s tlačítky, posuvníky nebo virtuálním joystickem.
- Tvorba vlastní aplikace: Kdo chce mít ovládání plně pod kontrolou, může si naprogramovat vlastní aplikaci. Nástroje jako MIT App Inventor umožňují sestavit si funkční aplikaci pro Android i bez pokročilých programátorských znalostí.
3. Program pro řídicí jednotku robota
Vytvářet programy pro desky ESP32 i Arduino je nejjednodušší v programu Arduino IDE, které používá programovací jazyk C++. V tomto prostředí vytvoříte kód, který poté můžete rovnou nahrát do vašeho mikrokontroleru.
V případě použítí aplikace Remote XY jako ovladače, tak vám aplikace vygeneruje kód, který stačí vložit do Arduino IDE a dopsat co se má stát po stisknutí ovládacích prvků. Po spárování aplikace pak skript v mikrokotroleru naslouchá a čeká na povely z mobilní aplikace. Podle přijatých dat ovládá výstupy (GPIO piny), ke kterým je připojen ovladač motorů.
Výhody a nevýhody tohoto řešení
Hlavní výhody:
- Úspora: Nemusíte kupovat specializovaný a často drahý RC vysílač.
- Přizpůsobitelnost: Uživatelské rozhraní v aplikaci si můžete navrhnout přesně podle svých představ.
- Pokročilé funkce: Lze využít senzory telefonu, jako je akcelerometr pro ovládání nakláněním.
Hlavní nevýhody:
- Odezva: Dotykový displej nikdy neposkytne tak přesnou a rychlou hmatovou odezvu jako fyzické páčky klasického ovladače.
- Rušení signálu: Spolehlivost bezdrátového spojení (Bluetooth, Wi-Fi) může být problematická v prostředí s velkým množstvím rušení, což je typické pro soutěžní arény.